Sports Robots
During my summer 2025 internship, I had the opportunity to explore various Universal Robots products used to automate production processes on the manufacturing floor. In between other projects, I took initiative to experiment with a UR10 robot in the corner of a warehouse. This significantly strengthened my skills in robotics programming, machine shop work, wiring, system integration, and plant operations. These early experiences laid the foundation for several innovative projects I later completed.
To make the learning more fun I posed the question “Can a $50,000 robot shoot a basketball?” Below is what that led to. Total project time is the number of days it took to accomplish each challenge while I was still doing other company projects.
Basketball Robots – Launcher and Motion Tracker
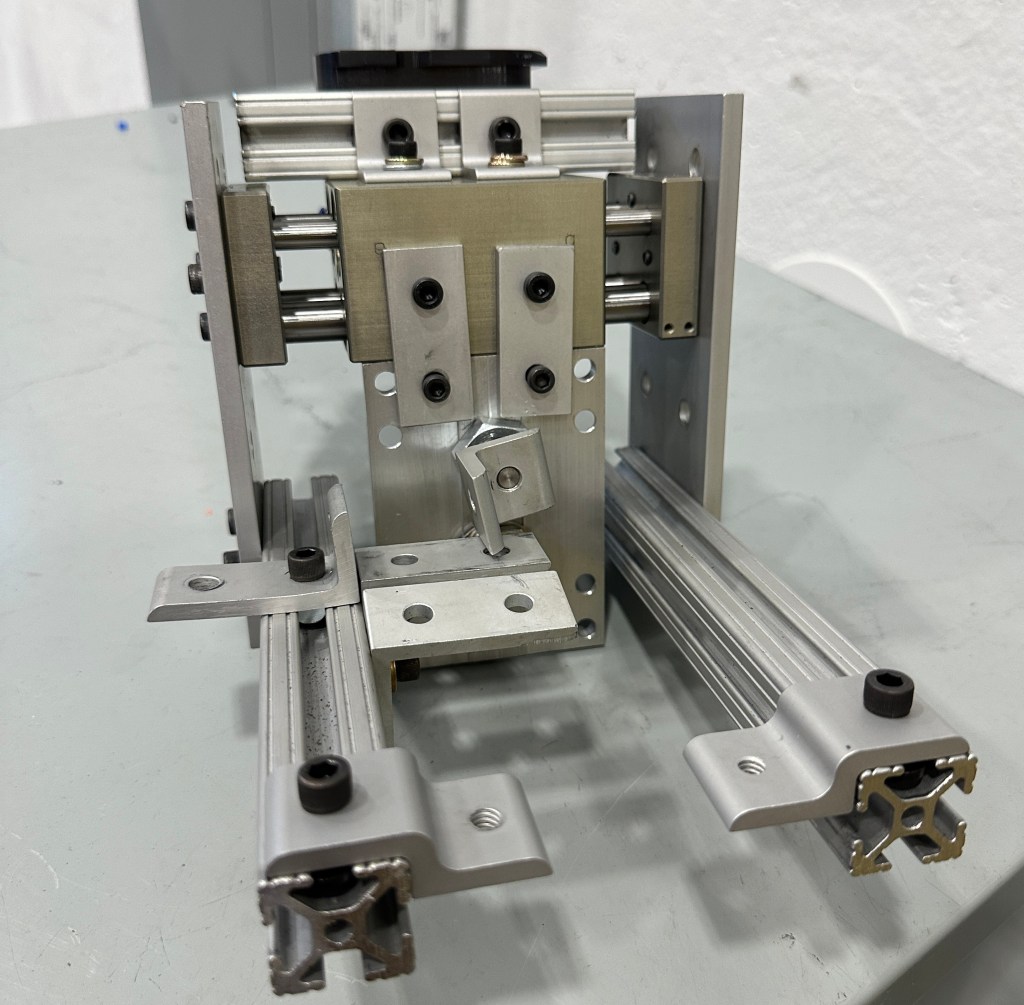
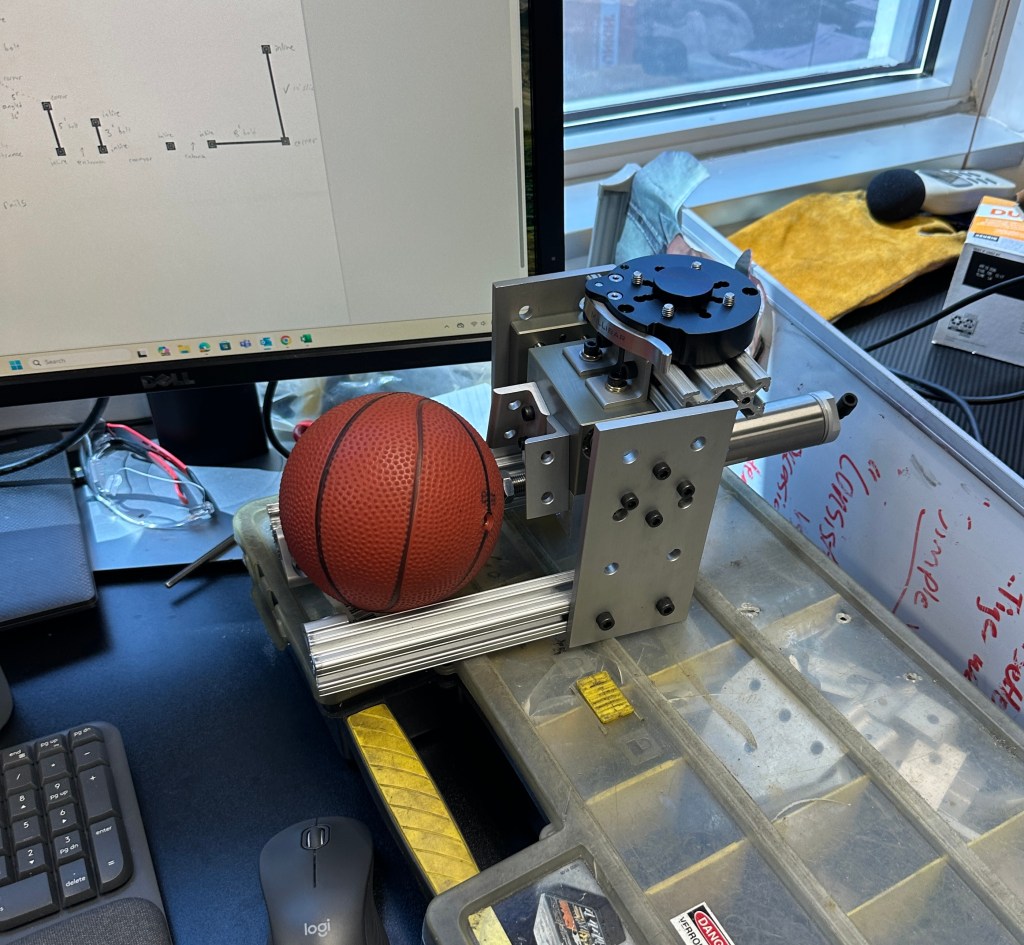
I designed and manufactured a custom end-of-arm tool (EOAT) for the UR10 robot to launch miniature basketballs. The tool used multiple pneumatic cylinders: one to pick up the ball from the floor, and another spring-loaded cylinder to shoot it. A part detection sensor was included to prevent unintentional ejection without a ball present. I also machined several parts to deal with metric and standard component inconsistencies.
Once the robot consistently launched balls into a scrap bin, a fellow plant engineer challenged me to have it bounce a shot off a wall and catch it. With help from another intern, we achieved this using clever timing and position adjustment.
Total Project Time ~4 days
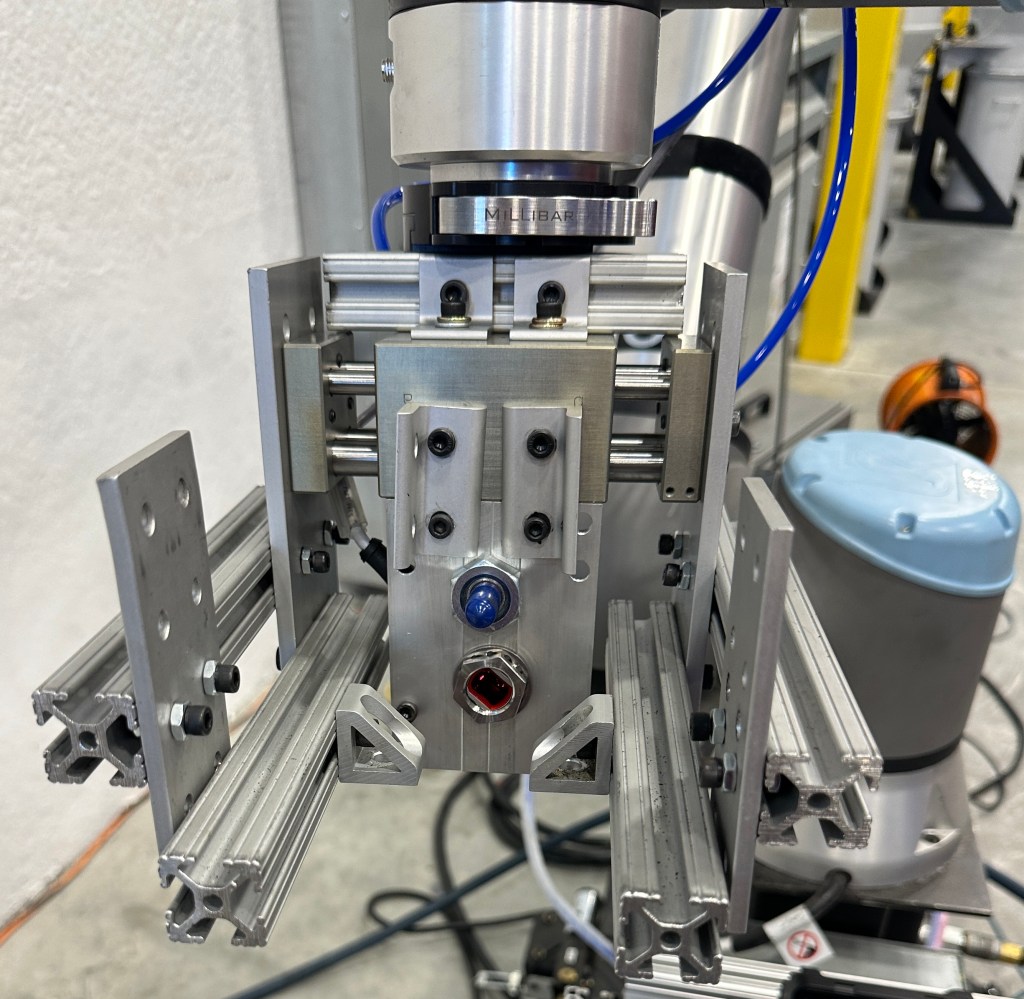
After completing the bounce-and-catch challenge, I aimed to create a more intelligent system using vision. Since the plant primarily used Keyence products, I used a spare IV3-600CA vision camera.
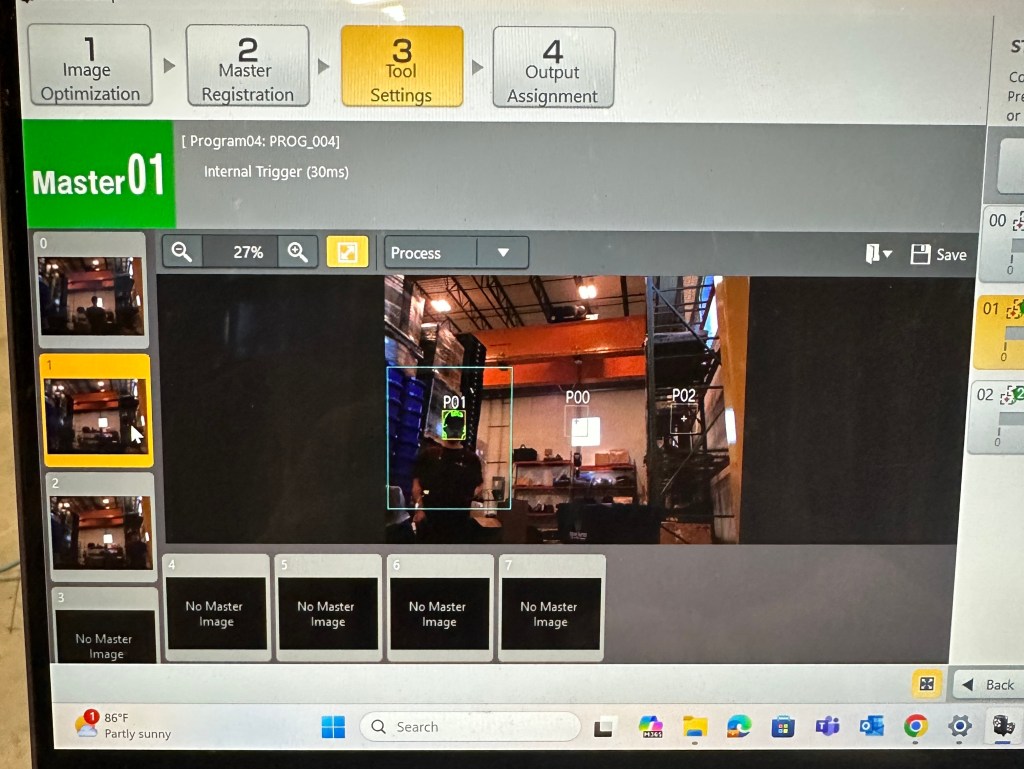
My goal soon shifted to making the robot track a person and pass the ball to them. Since the IV3 camera lacks direct motion-tracking capabilities, I configured multiple detection zones to recognize a user wearing a hat. When a zone was triggered, the camera sent a digital signal to the UR10 to initiate motion. I also added a gesture-based trigger using a hand recognition tool.
Total Project Time ~2.5 days

Football Robot
For a final challenge, I adapted the basketball EOAT to launch a miniature football after finding the ball in the office that same morning. With minor design adjustments, I engineered a launcher that produced enough torque and spin to shoot tight spirals consistently.
Total Project Time ~1 day