Summer 2025 Internship
For this internship, I ventured out of St. Louis to complete a 12-week internship in automation engineering at a plastic injection molding company.
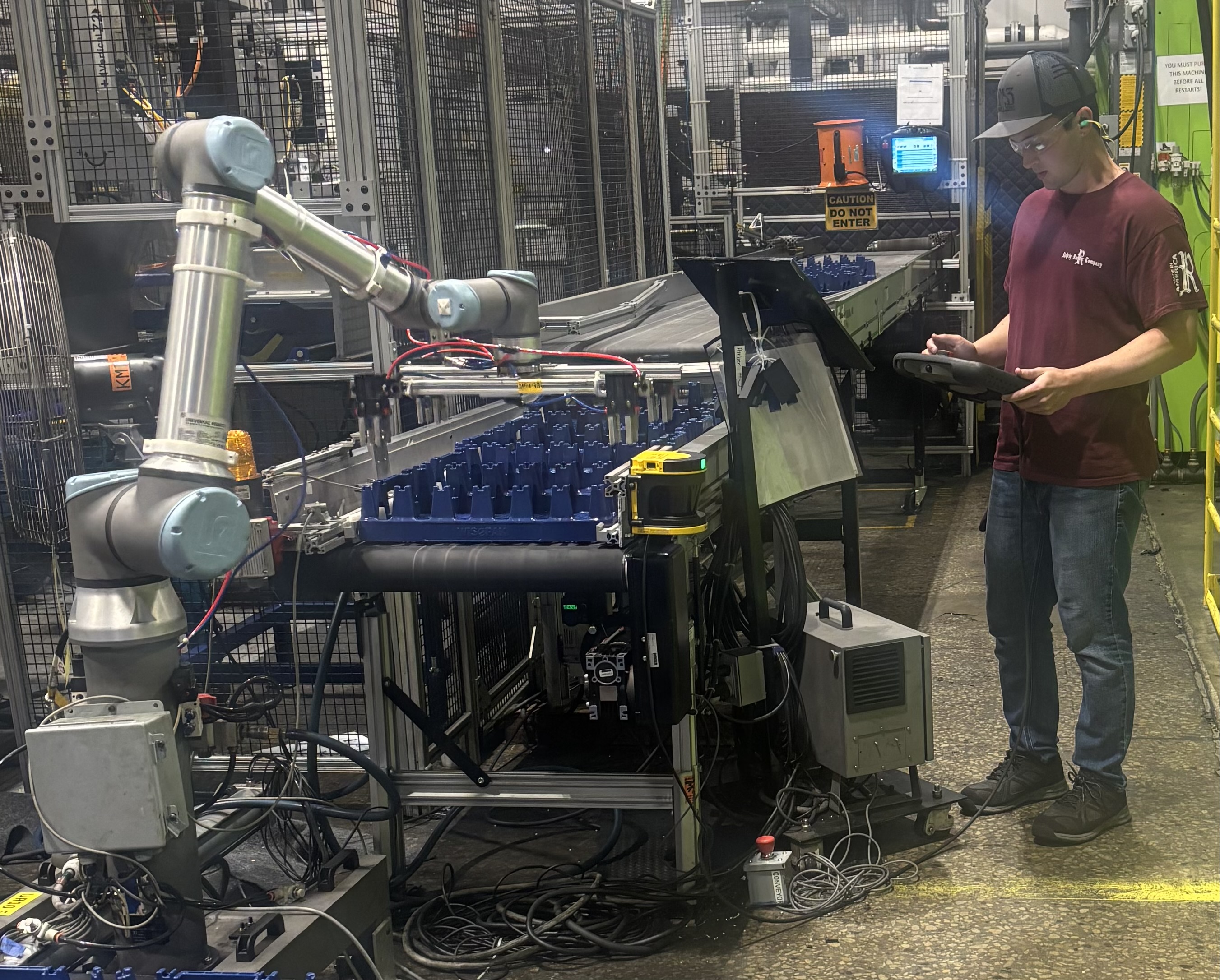

I gained extensive experience programming Universal Robots to efficiently automate the palletizing and stacking of products. This often meant designing and building custom end-of-arm tools (EOAT) and collaborating with multiple departments (Molds, Production, and Quality) to ensure the robots were positioned correctly, stacking accurately, and integrated with area scanners that slow or stop the robots when people are nearby.
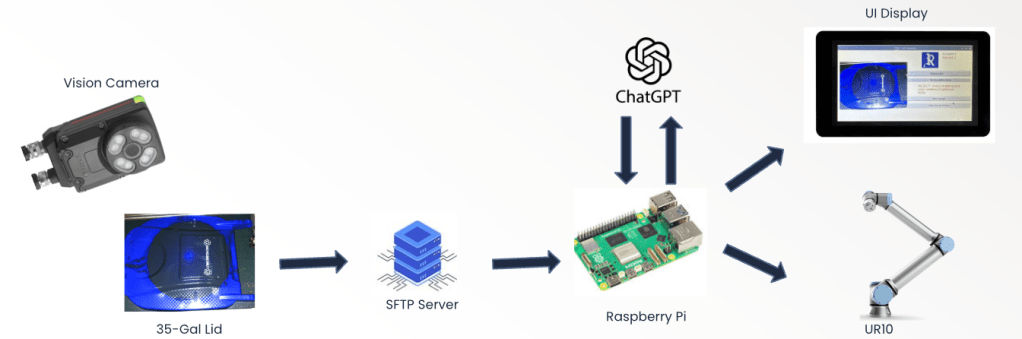
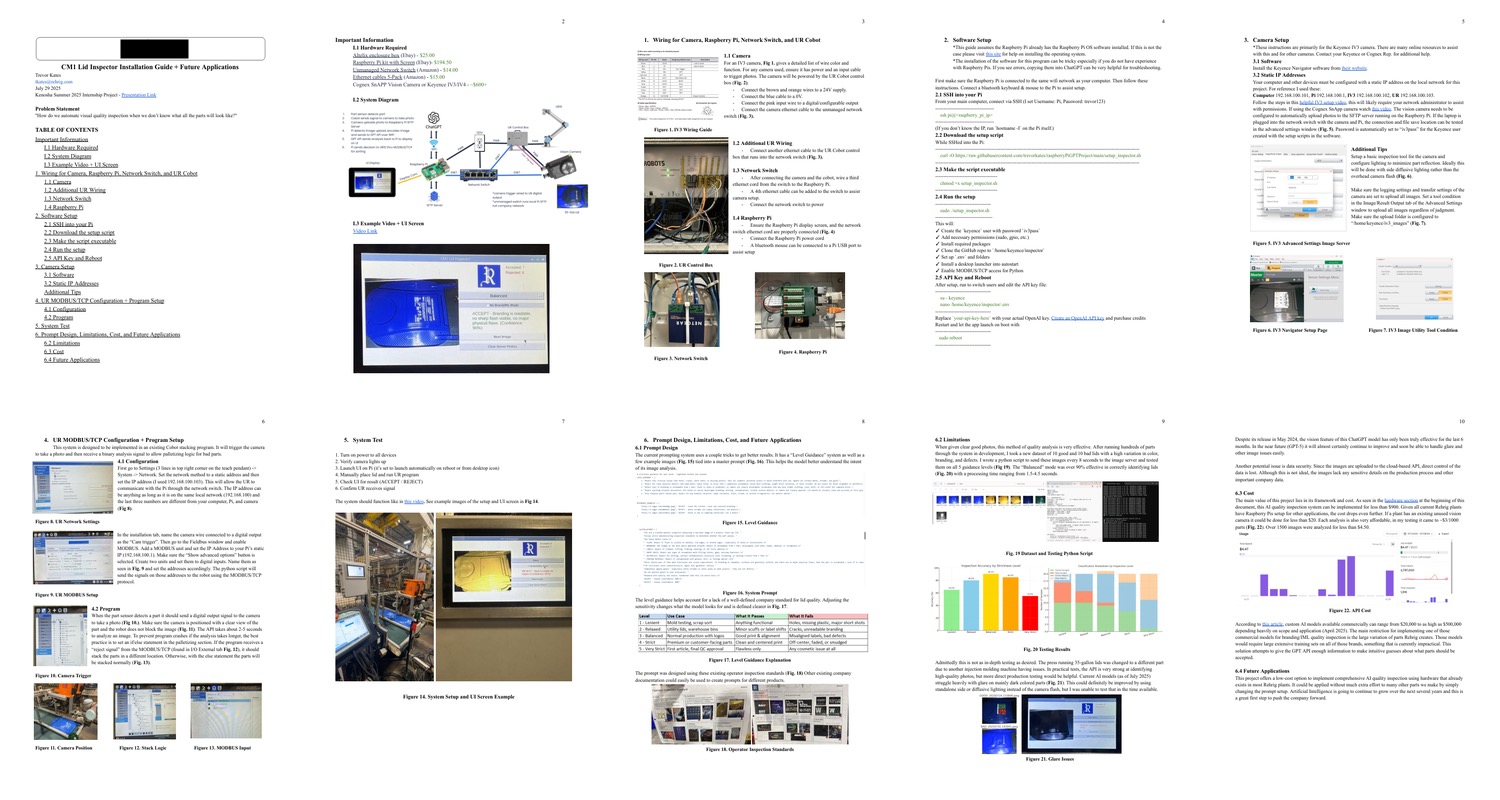
My favorite project, and the one that earned me Intern Project of the Year nationally, was developing a low-cost automated quality inspection system for cart lids that combines a Raspberry Pi, a cloud-based AI vision model (GPT-4o), and a UR10 Cobot. The goal was to create a system that could detect defects without the extensive pre-training required by most commercial solutions, making it adaptable to frequent changes in color, branding, and IML designs (see demo video above).
As lids move along the conveyor, a camera captures an image and sends it to the AI for analysis. The results are returned to a user interface and the robot, which sorts accepted and rejected parts automatically. Operators can adjust sensitivity and toggle modes, such as a “no brand” option, directly from the interface. The system reliably identifies major defects like color streaks, misapplied labels, and surface deformities, while ongoing improvements aim to increase accuracy on fine details such as faint branding or glare on darker parts.
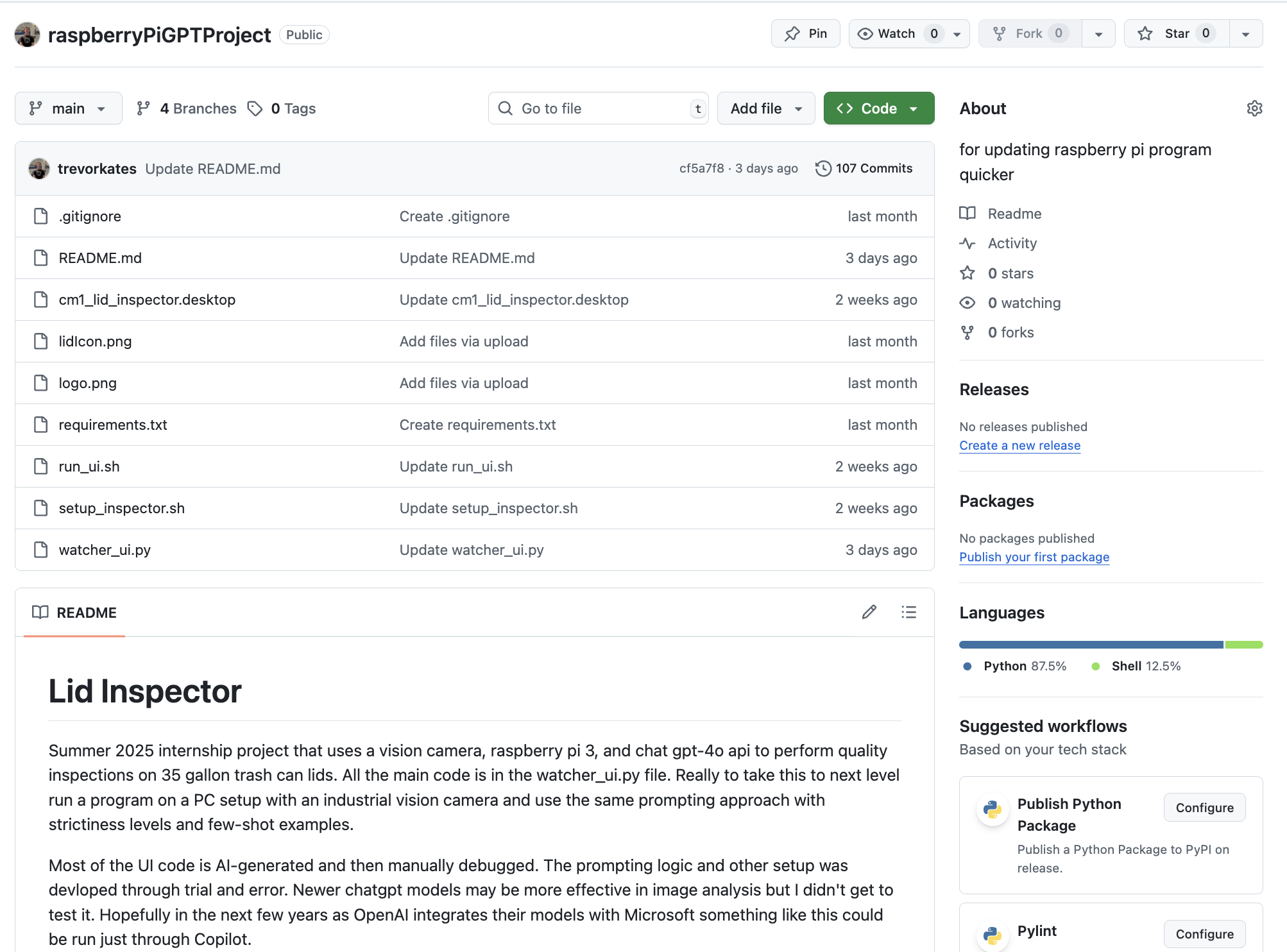
I documented the full build, including a GitHub repository of the code, a floor-level operator’s guide, and a detailed technical manual outlining wiring, integration, limitations, and future applications. Its flexible architecture allows for easy hardware upgrades, such as high-speed industrial vision cameras, and the integration of newer AI models as they become available.
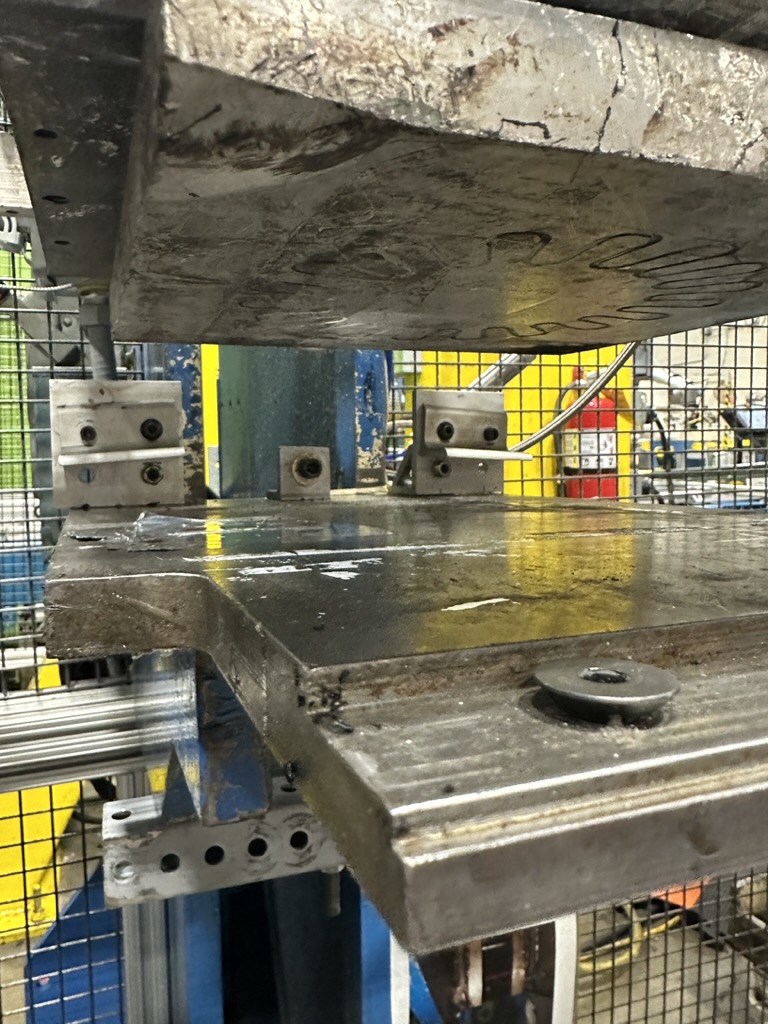
I also designed and built custom part-guidance systems for conveyors to correctly position products for branding or stacking. This work involved fabricating components in the machine shop and using power tools to securely anchor everything in place.


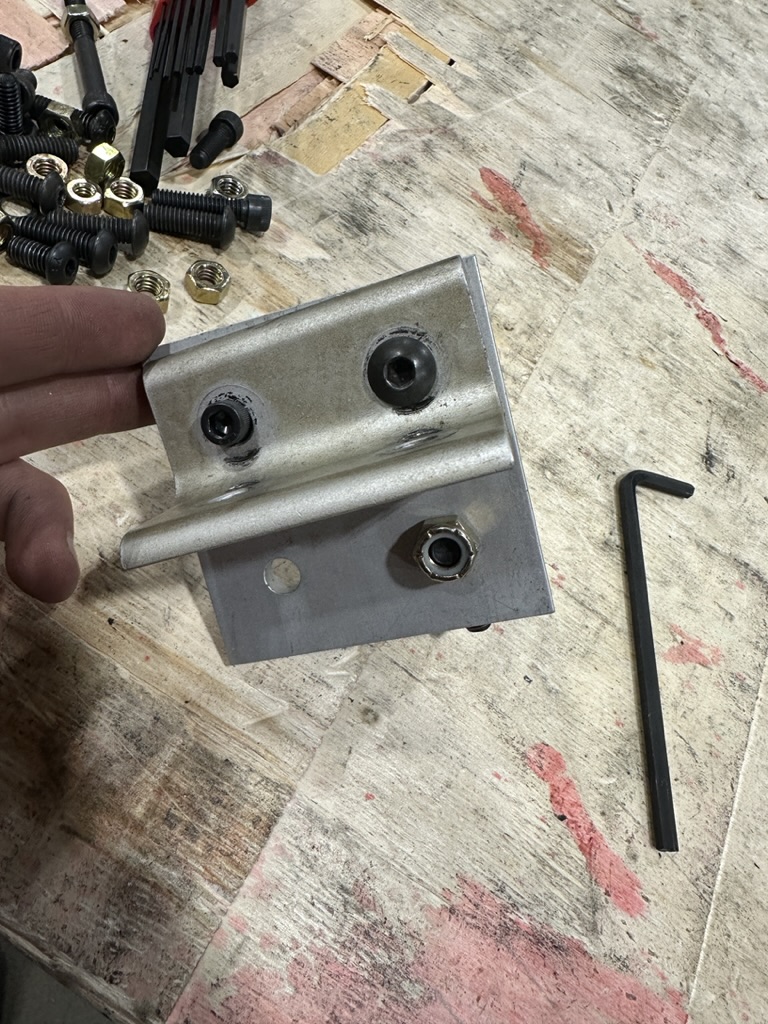
I completed several small, hardware-focused projects to improve existing machines. These included 3D-printing collars to prevent brand tape from walking and installing custom-machined brackets that secured carts in place during manual branding, regardless of orientation (see video above).

To reduce dust escaping from a regrind cleaning system, I designed and 3D-printed a custom pipe adapter that connected a circular pipe to a square bin opening. The adapter was built to accommodate multiple plastic collection bin sizes, improving containment and versatility.


I designed and installed a rolling mechanism to make the existing dust hoods over a regrind tipper bin system retractable. The goal was to allow operators to easily position the hoods to contain dust while pouring in regrind material. The project required creating a custom mounting solution and drilling into the tipper bins’ surprisingly tough metal sides using a handheld drill.

Additionally, I led the design and installation of a protective railing system around an automatic pallet wrapper and QC hold area. To optimize the design and reduce costs, I incorporated as much existing spare railing as possible and sourced only the necessary additional components. This approach saved over $4,500 compared to a full new system. I managed the layout, ordering, and coordination, and the installation was completed in under three days.

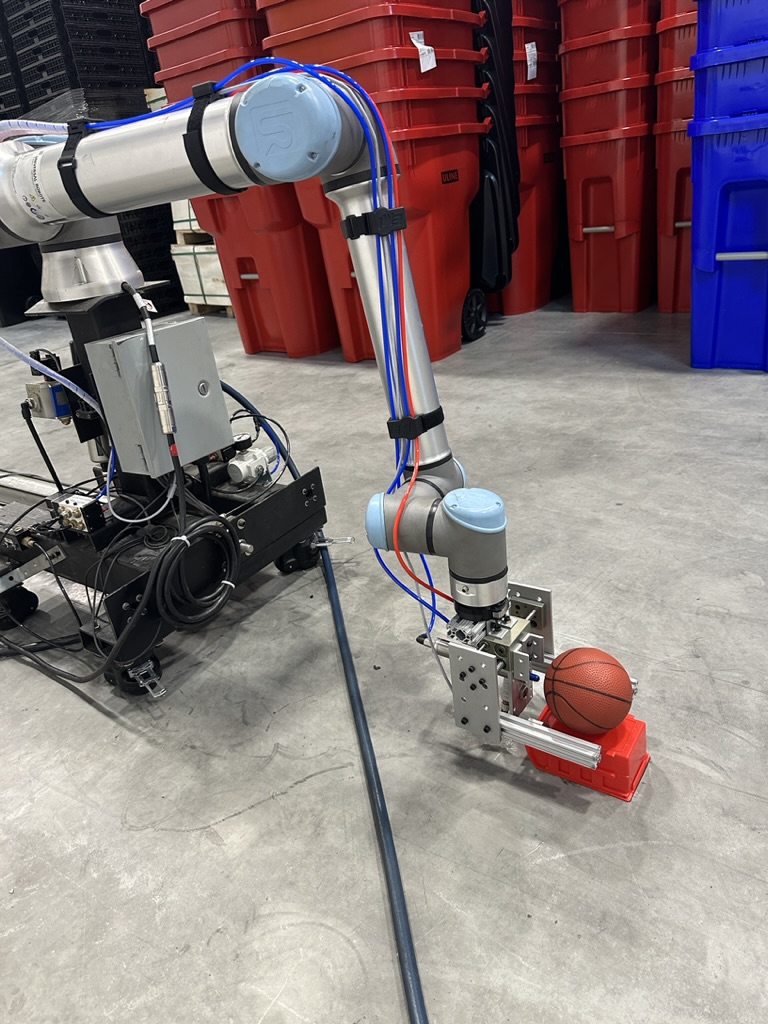
Outside of production-focused work, I also explored creative uses of the UR10 Cobot to broaden my skills (and it was a lot of fun). See my Sports Robots page for more.